Asignatura: Diseño y Control Control por PC -
|
CONTROLADORA PARA MOTOR DE CORRIENTE CONTINUA
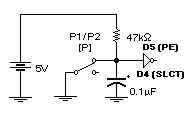
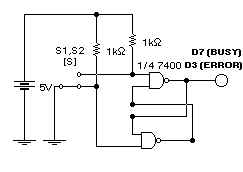
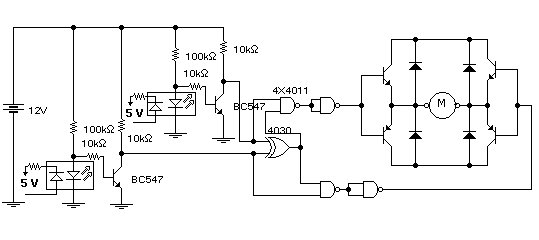
La controladora para motor cc consiste en dos circuitos opto-acoplados. Uno controlado a través del puerto paralelo del ordenador y otro que activa directamente el motor en ambos sentidos y con función de paro automático. El circuito de control dispone de dos pulsadores marcha y paro, dos interruptores de fin de carrera y dos led indicadores. El circuito de potencia activa un motor de corriente continua alimentado con una fuente externa de 12 voltios. La conexión entre ambos circuitos se realiza a través de dos opto-acopladores que generan una señal lógica de dos bits, cuyos cuatro estados gobiernan el motor cc. ESQUEMA CONTROLADORAEstos esquemas muestran los circuitos de entrada de los pulsadores e interruptores marcha-paro: un circuito anti-rebotes utilizando un disparador 7414 y un flip-flop con un par de puertas nand 7400. Las salidas de estos circuitos se leen mediante los bits D3,D4,D5 y D7 del puerto de estado.
{bml S1YS2.bmp}
Este otro esquema muestra el diagrama lógico del circuito que controla el motor cc (como la alimentación es de 12 V se utilizan puertas cmos 4011 (nand) y una 4030 (xor). El control se realiza mediante los bits D0 y D1 del puerto de datos del ordenador.
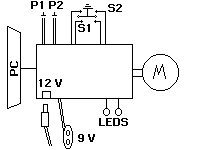
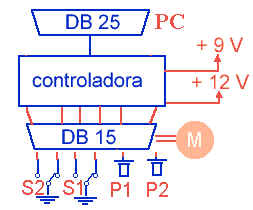
Este esquema muestra los conectores de alimentación de 12 y 5 voltios, al PC (25 pines) y al dispositivo controlado (15 pines):
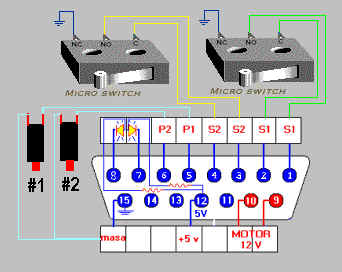
CONECTORES DEL DISPOSITIVO CONTROLADO El esquema muestra la conexión a la controladora del dispositivo (escalera, puerta, barrera, etc) a través de un conector Sub-D de 15 pines.
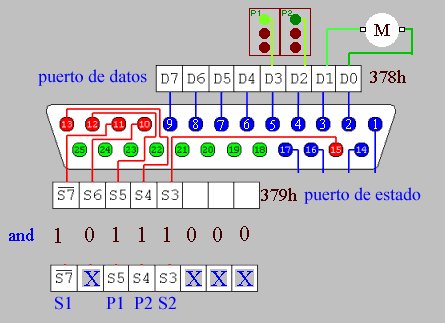
En la imagen puede verse cómo se aplica una máscara al byte de estado (10111000) para obtener la información de estos bits únicamente. Las salidas del programa se envían a la controladora utilizando los bits de menor peso (d0 y d1) del puerto de datos (dirección 378h) para controlar la dirección del motor, y los bits d2 y d3 para activar dos leds o indicadores.
Algunos dispositivos que pueden conectarse a la controladoras son: una barrera, una puerta automática, un ascensor, etc.
BARRERA ELECTRÓNICA
ASCENSOR ESCALERA
PUERTA AUTOMATICA
El programa PRJESCAL.EXE está realizado en DELPHI 2.0 y permite controlar cualquier dispositivo conectado a la controladora a través del puerto paralelo del PC.Aquí puedes ver su aspecto:
La pantalla de simulación muestra tres animaciones de diferentes dispositivos que pueden activarse pulsando sobre los botones P1 y P2. Los dos grupos de leds muestran el estado del puerto de salida y del puerto de entrada de la impresora, a donde está conectada la controladora.
La otra pantalla muestra el estado real de los interruptores y pulsadores del dispositivo controlado. A continuación se proponen ejemplos de utilización de la controladora desde TurboPascal y QBasic: En TurboPascal: program ESCALERA; uses crt,dos,TEXTLIB; var x,n,s:integer; B,A,BB:BYTE; C:CHAR; P1,P2,S1,S2:boolean; PUERTOiN,PUERTOouT:word;
function d7(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$80 end; function d6(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$40 end; function d5(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$20 end; function d4(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$10 end; function d3(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$08 end; function d2(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$04 end; function d1(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$02 end; function d0(b:byte):byte;assembler; asm XOR AX,AX MOV AL,B AND AL,$01 end;
BEGIN {repeat b:=LEEHIGHNIBBLE(b); GOTOXY(10,10); WRITE(B); until KEYPRESSED; HALT;} CLRSCR; WRITELN; WRITELN; WRITELN(' CONTROLADORA MOTOR C.C. '); gotoxy(20,12); writeln('1: Puerto LPT1 2: Puerto LPT2'); REPEAT UNTIL KEYPRESSED; c:=readkey; if c='1' then begin PUERTOout:=$378;PUERTOin:=$379;end; if c='2' then begin PUERTOout:=$278;PUERTOin:=$279;end; GOTOXY(40,8);WRITELN('Puerto: ',PUERTOout); CSROFF;clrscr; B:=0; P1:=false; P2:=false; GOTOXY(8,1); WRITE(' CONTROLADORA MOTOR (ESCALERA,PUERTA AUTOMATICA..)'); GOTOXY(8,2); WRITE(' __________________________________________________'); GOTOXY(8,3); WRITE(' P2 pulsado y s1 activado : $90 1001 0000'); GOTOXY(8,4); WRITE(' P2 pulsado y s1 desactivado : $01 0001 0000'); GOTOXY(8,5); WRITE(' P1 pulsado y s2 activado : $28 0010 1000'); GOTOXY(8,6); WRITE(' P1 pulsado y s2 desactivado : $20 0010 0000'); GOTOXY(8,23); WRITE(' 1: Port LPT1 2: Port LPT2 S: subir B: bajar ESC: Salir'); {c:=#32;} WHILE NOT (c=#27) DO BEGIN c:=#32; bb:=0; {para que el OR 0000 0000 no afecte al byte b} IF KEYPRESSED THEN begin c:=readkey; if c='1' then begin PUERTOout:=$378;PUERTOin:=$379;end; if c='2' then begin PUERTOout:=$278;PUERTOin:=$279;end; if (c='s') or (c='S') then bb:=$20; if (c='b') or (c='B') then bb:=$10;
end; b:=port[PUERTOin]; { $379];} b:=b AND $B8; {a cero ACK y bits no usados D0 D1 y D2 = 1011 1000} b:=b OR bb; {activar bits D5 o D4 P1 o P2 !} if (b=8) and not(p1) then begin port[PUERTOout]:=15; { $378]:=15;} P1:=false; P2:=false; end; if (b=128) and not(P2) then begin port[PUERTOout]:=15; P1:=false; P2:=false; end; S1:=(b and $80)=$80; S2:=(b and $08)=$08; if b=$90 then P2:=true; {si s1 activado y se pulsa bajar p2 1001 0000} if b=16 then begin P2:=true; P1:=false; end; if b=$28 then P1:=true; {si s2 activado y se pulsa subir p1 0010 1000} if b=32 then begin P1:=true; P2:=false; end; if b=$30 then port[PUERTOout]:=15; if P2 then port[PUERTOout]:=5; if P1 then port[PUERTOout]:=10; a:= port[PUERTOout]; GOTOXY(13,9); WRITE(B,' ',A,' '); gotoxy(13,10); write('status data S1 S2'); gotoxy(10,11);WRITE('D7 ',D7(b),' ',D7(a),' ',S1,' ',S2,' '); gotoxy(10,12);WRITE('D6 ',D6(b),' ',D6(a),' '); gotoxy(10,13);WRITE('D5 ',D5(b),' ',D5(a),' '); gotoxy(10,14);WRITE('D4 ',D4(b),' ',D4(a),' '); gotoxy(10,15);WRITE('D3 ',D3(b),' ',D3(a),' '); gotoxy(10,16);WRITE('D2 ',D2(b),' ',D2(a),' '); gotoxy(10,17);WRITE('D1 ',D1(b),' ',D1(a),' '); gotoxy(10,18);WRITE('D0 ',D0(b),' ',D0(a),' '); writeln; writeln('--------'); if not(P1) and not(p2) then begin gotoxy(10,20);write('Û.............-- DETENIDA --...........Û');END; if P1 then begin gotoxy(10,20);write('ÛÛÛ.....ÚÙ..<-- SUBIENDO ...............');END; if P2 then begin gotoxy(10,20);write('............... BAJANDO -->.....ÚÙ...ÛÛÛ');END; END; C:=READKEY; CSRON; END. false = 0 true = -1 CLS PRINT " CONTROLADORA MOTOR C.C. ');" LOCATE 12, 20 PRINT "1: Puerto LPT1 2: Puerto LPT2);" c$ = "" WHILE c$ = "": c$ = INKEY$: WEND 'C$ = INKEY$ IF c$ = "1" THEN PUERTOout = 888: PUERTOin = 889 IF c$ = "2" THEN PUERTOout = 632: PUERTOin = 633 LOCATE 8, 40: PRINT "Puerto: "; PUERTOout CLS b = 0 P1 = false P2 = false LOCATE 1, 8: PRINT "' CONTROLADORA MOTOR (ESCALERA,PUERTA AUTOMATICA..)');" LOCATE 2, 8: PRINT "' __________________________________________________');" LOCATE 3, 8: PRINT "' P2 pulsado y s1 activado : $90 1001 0000');" LOCATE 4, 8: PRINT "' P2 pulsado y s1 desactivado : $01 0001 0000');" LOCATE 5, 8: PRINT "' P1 pulsado y s2 activado : $28 0010 1000');" LOCATE 6, 8: PRINT "' P1 pulsado y s2 desactivado : $20 0010 0000');" LOCATE 23, 8: PRINT "' 1: Port LPT1 2: Port LPT2 S: subir B: bajar ESC: Salir');" '{c:=#32;} WHILE c$ <> CHR$(27) c$ = CHR$(32) BB = 0'{para que el OR 0000 0000 no afecte al byte b} c$ = INKEY$ IF c$ = "1" THEN PUERTOout = 888: PUERTOin = 889 IF c$ = "2" THEN PUERTOout = 632: PUERTOin = 633 IF (c$ = "s") OR (c$ = "S") THEN BB = 32 IF (c$ = "b") OR (c$ = "B") THEN BB = 16 b = INP(PUERTOin)' { $379];} b = b AND &HB8' {a cero ACK y bits no usados D0 D1 y D2 = 1011 1000} b = b OR BB'{activar bits D5 o D4 P1 o P2 !} IF (b = 8) AND NOT (P1) THEN : OUT PUERTOout, 15: P1 = false: P2 = false IF (b = 128) AND NOT (P2) THEN OUT PUERTOout, 15: P1 = false: P2 = false s1 = (b AND &H80) = &H80: s2 = (b AND &H8) = &H8 IF b = &H90 THEN P2 = true'{si s1 activado y se pulsa bajar p2 1001 0000} IF b = 16 THEN P2 = true: P1 = false IF b = &H28 THEN P1 = true'{si s2 activado y se pulsa subir p1 0010 1000} IF b = 32 THEN P1 = true: P2 = false IF b = &H30 THEN OUT PUERTOout, 15 IF P2 THEN OUT PUERTOout, 5 IF P1 THEN OUT PUERTOout, 10 A = INP(PUERTOout) LOCATE 9, 13: PRINT b; " "; A; " "; LOCATE 10, 13: PRINT "status data S1 S2"; LOCATE 11, 10: PRINT "D7 "; b AND 128; " "; A AND 128; " "; s1; " "; s2; " "; LOCATE 12, 10: PRINT "D6 "; b AND 64; " "; A AND 64; " "; LOCATE 13, 10: PRINT "D5 "; b AND 32; " "; A AND 32; " "; LOCATE 14, 10: PRINT "D4 "; b AND 16; " "; A AND 16; " "; LOCATE 15, 10: PRINT "D3 "; b AND 8; " "; A AND 8; " "; LOCATE 16, 10: PRINT "D2 "; b AND 4; " "; A AND 4; ' '; LOCATE 17, 10: PRINT "D1 "; b AND 2; " "; A AND 2; " "; LOCATE 18, 10: PRINT "D0 "; b AND 1; " "; A AND 1; " "; PRINT "--------" LOCATE 1, 70: PRINT P1; " "; P2 IF NOT (P1) AND NOT (P2) THEN LOCATE 20, 10: PRINT "Û.............-- DETENIDA --...........Û" IF P1 THEN LOCATE 20, 10: PRINT "'ÛÛÛ.....ÚÙ..<-- SUBIENDO ..............." IF P2 THEN LOCATE 20, 10: PRINT "............... BAJANDO -->.....ÚÙ...ÛÛÛ" WEND c$ = "" WHILE c$ = "": c$ = INKEY$: WEND |